Selecting the right tools ensures efficiency, compatibility, and scalability.
Key factors include:
- Ease of use & productivity
A toolchain should provide intuitive development workflows with integrated debugging, static analysis, and automated testing.
- Compatibility with hardware
Support for multiple MCUs and architectures (Arm, RISC-V, MSP430, AVR, Renesas RL78) is crucial. IAR Embedded Workbench supports a broad range of architectures, ensuring developers have flexibility in their projects.
Real-time debugging, trace analysis, and runtime profiling are essential for reliability.
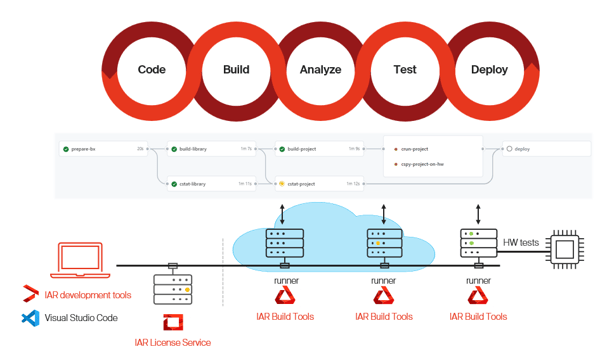
- Scalability & CI/CD integration
Tools should support command-line builds (CLI), CMake, and integration with CI/CD platforms like GitHub, GitLab, and Jenkins for automated testing.
Coding standards (MISRA, CERT C), security frameworks (IEC 62443), and functional safety (ISO 26262, IEC 61508) should be built-in.











![[EN] Industries | Automotive](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/car%20with%20the%20lights%20on%20back%20and%20grey.png?width=600&height=338&name=car%20with%20the%20lights%20on%20back%20and%20grey.png)
![[EN] Products | Industries | Industrial Automation](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/Industrial%20automation/yellow_industry_robot_adobestock_213480015.jpeg?width=600&height=382&name=yellow_industry_robot_adobestock_213480015.jpeg)
![[EN] Industries | Medical](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/Medical%20doctor%20infront%20of%20screen%20with%20lungs%20%20on%20display.jpeg?width=600&height=336&name=Medical%20doctor%20infront%20of%20screen%20with%20lungs%20%20on%20display.jpeg)
![[EN] Industries | Machinery control](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/switchboard.jpg?width=600&height=400&name=switchboard.jpg)
![[EN] Industries | Household appliance](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/household%20appliance%20smart%20home%20screen%20on%20sofa%20table.jpg?width=600&height=338&name=household%20appliance%20smart%20home%20screen%20on%20sofa%20table.jpg)
![[EN] Industries | Household appliance](https://www.iar.com/hs-fs/hubfs/WEB%202025/Images/Industries/industries-household-appliance-4x5.jpg?width=600&height=750&name=industries-household-appliance-4x5.jpg)